Berechnung der MS-Signale:
Es werden 2 Mikrofone verwendet: das Mikrofon für den Mittenkanal M ist nach vorne gerichtet, während das Mikrofon Fig-8 für den Seitenkanal S mit der positiven Keule nach -90° gerichtet ist.
Nach der allgemeinen Mikrofongleichung lassen sich die beiden Mikrofone wie folgt beschreiben:
M = (1-a) + a * cos (β);
S = cos (β+90°); mit a = Kugelanteil; β = Einfallswinkel;
Der Pegel bei β=0° ist 1;
Die Dekodierung der beiden Signale erfolgt durch Summe und Differenz, wobei der Anteil der Fig-8 beliebig eingestellt werden kann. Der Faktor k (Pegel des S-Signals) bestimmt die resultierende Stereobreite.
L = M + k * S;
R = M - k * S; mit k = Pegel von S;
Nach Einsetzen der obigen Mikrofongleichungen in diese Dekodierungsvorschriften ergeben sich nach einigen Umformungsoperationen:
L = (1-m) + m * cos (β+ϑ);
R = (1-m) + m * cos (β-ϑ); mit m = Kugelanteil; β = Einfallswinkel;
Die resultierenden Signale L und R entsprechen also koinzidenten Mikrofonen erster Ordnung, die in einem Winkel ±ϑ zueinander angeordnet sind, also in einem Versatzwinkel von 2ϑ.
- Der Winkel ϑ ergibt sich aus ϑ=atan(k/a) --> je mehr S gemischt wird, desto größer ist der Öffnungswinkel.
- Der Pegel p auf der Hauptachse des virtuellen Mikrofons ergibt sich aus p = (1-a)+√(k²+a²); --> je mehr S gemischt wird, desto größer ist der Pegel.
- Der Druckgradientenanteil m des entstehenden virtuellen Mikrofons ergibt sich aus m = √(k²+a²)/p --> je mehr Acht gemischt wird, desto größer ist auch der Druckgradientenanteil.
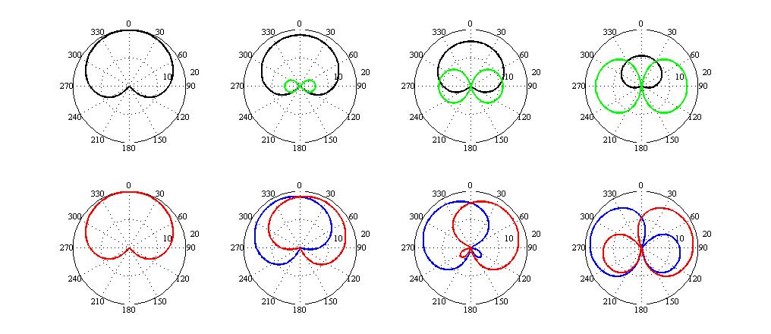
Die folgende Grafik veranschaulicht die Signale M und S (schwarz und grün), die jeweils zu L und R (blau und rot) werden, bei unterschiedlichen k (Pegel von S):