CALCUL DES SIGNAUX MS :
Deux microphones sont utilisés : le microphone pour le canal médian M est dirigé vers l'avant, tandis que le microphone Fig-8 pour le canal latéral S est dirigé avec son lobe positif à -90°.
Après l'équation générale des microphones, les deux microphones peuvent être décrits comme suit :
M = (1-a) + a * cos (β) ;
S = cos (β + 90 °) ; où a = partie sphérique ; β = angle d'incidence ;
Le niveau à β = 0 ° est 1 ;
Le décodage des deux signaux est effectué par somme et différence, la proportion du Fig-8 pouvant être fixée arbitrairement. Le facteur k (niveau du signal S) détermine la largeur stéréo résultante.
L = M + k * S ;
R = M - k * S ; où k = niveau de S ;
Après avoir inséré les équations du microphone ci-dessus dans ces règles de décodage et quelques opérations de transformation :
L = (1-m) + m * cos (β + θ) ;
R = (1-m) + m * cos (β-θ) ; où m = partie omni ; β = angle d'incidence ;
Les signaux résultants L et R correspondent donc à des microphones de premier ordre disposés en coïncidence, qui sont disposés à un angle ± θ l'un par rapport à l'autre, c'est-à-dire à un angle de décalage de 2θ.
L'angle θ résulte de θ = atan (k / a) -> plus S est mélangé, plus l'angle d'ouverture est grand.
Le niveau p sur l'axe principal du microphone virtuel est donné par p = (1-a) + √ (k² + a²) ; -> plus S est mélangé, plus le niveau est élevé.
La composante m du gradient de pression du microphone virtuel résultant est donnée par m = √ (k² + a²) / p -> plus la Fig-8 est mélangée, plus la composante du gradient de pression est importante.
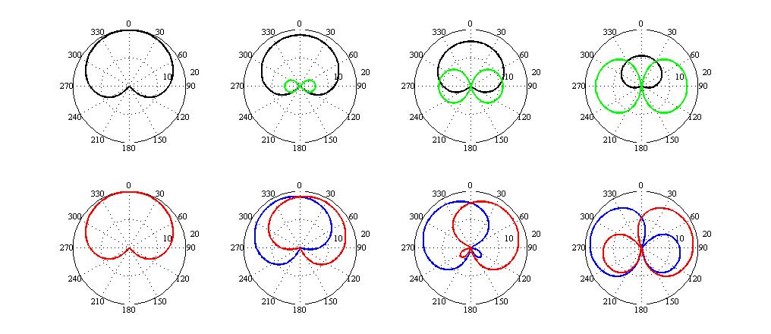
Le graphique suivant illustre les signaux M et S (noir et vert), qui deviennent respectivement L et R (bleu et rouge), à des valeurs k différentes (niveaux de S) :